СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-C50 Колаборативний електричний захват




Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування
Роботизовані захватні пристрої серії SCIC Z-EFG мають невеликі розміри та вбудовану сервосистему, що дозволяє досягати точного контролю швидкості, положення та сили затиску. Передова система захоплення SCIC для автоматизованих рішень дозволить вам відкрити нові можливості для автоматизації завдань, які ви ніколи не вважали можливими.

Функція

·Виявлення падіння захвата, функція виведення площі
· Зусилля, положення та швидкість можна точно контролювати через Modbus
·Тривалий термін служби: десятки мільйонів циклів, що перевершує повітряні кігті
·Вбудований контролер: малий розмір, проста інтеграція
·Режим керування: 485 (Modbus RTU), введення/виведення
Хід 50 мм, затискна сила 140 Н, сумісний з 6-осьовим роботом-маніпулятором.
Висока частота
Найкоротший час ходу становить 0,5 с
Висока точність
Повторюваність ±0,03 мм
Висока корисна вантажопідйомність
Рекомендована вага затискання ≤2 кг
Підключи та працюй
Електричний захват спеціально для 6-осьової роботизованої руки
Змінний хвіст
Його хвіст змінний, підходить для різних запитів
М'яка сила затиску
Він може затискати крихкі та деформовані предмети

● Сприяння революції в заміні пневматичних захватів електричними, перший електричний захват із вбудованою сервосистемою в Китаї.
● Ідеальна заміна повітряного компресора + фільтра + електромагнітного клапана + дросельної заслінки + пневматичного захоплювача
● Багатоцикловий термін служби, що відповідає традиційному японському циліндрі



Параметр специфікації
| Модель № Z-EFG-C50 | Параметри |
| Загальний інсульт | регульований 50 мм |
| Сила захоплення | регульований 40-140 Н |
| Повторюваність | ±0,03 мм |
| Рекомендована вага захоплення | ≤2 кг |
| Режим передачі | Зубчаста рейка + сферична направляюча |
| Поповнення мастила рухомих компонентів | Кожні шість місяців або 1 мільйон рухів / час |
| Час руху в одному напрямку | 0,5 с |
| Режим руху | Два пальці рухаються горизонтально |
| Вага | 1 кг |
| Розміри (Д*Ш*В) | 72*72*143 мм |
| Робоча напруга | 24 В ± 10% |
| Номінальний струм | 0,8 А |
| Піковий струм | 2A |
| Потужність | 20 Вт |
| Клас захисту | IP20 |
| Тип двигуна | Безщітковий постійного струму |
| Діапазон робочих температур | 5-55℃ |
| Робочий діапазон вологості | RH35-80 (Без замерзання) |

| Допустиме статичне навантаження у вертикальному напрямку | |
| Фз: | 300 Н |
| Допустимий крутний момент | |
| Мх: | 7 Нм |
| Моє: | 7 Нм |
| Мз: | 7 Нм |
Інтегроване керування та контролер
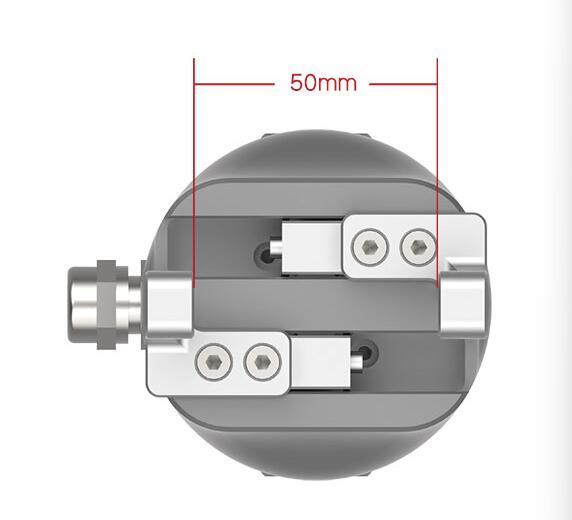
Електричний захват Z-EFG-C50 має вбудовану сервосистему, його загальний хід становить 50 мм, зусилля затиску – 40-140 Н, хід та зусилля затиску регулюються, а повторюваність – ±0,03 мм.

Сумісний з шестиосьовим роботизованим маніпулятором

Електричний захват сумісний з 6-осьовим роботом-маніпулятором, що забезпечує простоту підключення за принципом «підключи та працюй», а найкоротший час його ходу становить лише 0,5 с, що відповідає вимогам до затискання для стабільної виробничої лінії.
Малий розмір, гнучке встановлення

Z-EFG-C50 використовує режим передачі: зубчаста рейка + кулькова напрямна рейка, розмір виробу становить Д72*Ш72*В143 мм, що дозволяє гнучко розташовувати його в умовах невеликої площі.


Швидка реакція, точність для контролю сили

Найкоротший час одного ходу становить лише 0,5 с, що дозволяє швидко виконувати завдання затискання, а його хвостові частини можна змінювати в будь-який час, а клієнти можуть регулювати хвостові частини відповідно до потреб.
Режими керування множинними параметрами, прості в експлуатації

Конфігурація Z-EFG-C50 проста, вона має безліч режимів керування, включаючи 485 (Modbus RTU), імпульсний, введення/виведення, та сумісна з головною системою керування ПЛК.

Зміщення центру ваги навантаження
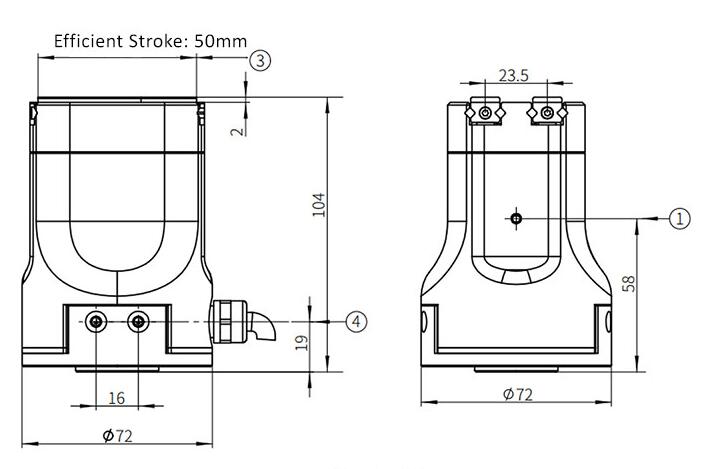
1. Світлодіодний індикатор
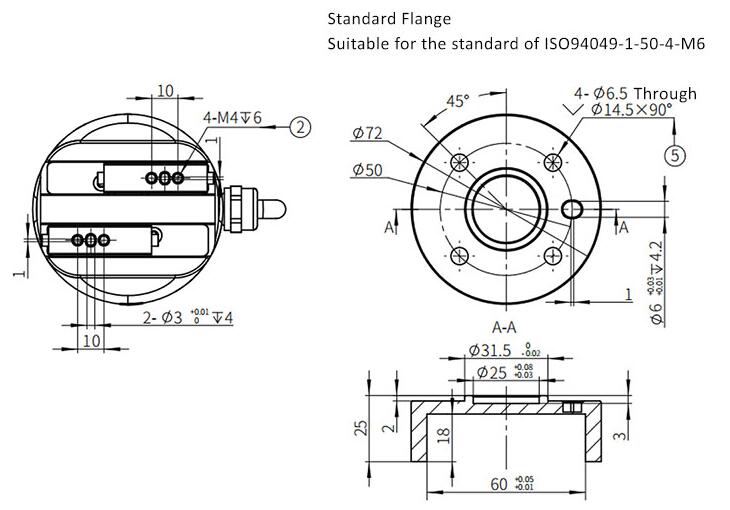
2. Місце встановлення, використовуйте 4 гвинти M4
3. Хід електричного захвату становить 50 мм
4. Вихідний отвір для гайки
5. Місце встановлення, використовуйте 4 гвинти M6 для з'єднання з клемним фланцем маніпулятора робота-колаборатора.
Наш бізнес


Категорії продуктів
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ CG – ...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGC –...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGE –...
-

СЕРІЯ ELECTRIC GRIPPER HITBOT – Z-EFG-12 Paral...