СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-R Колаборативний електричний захват



Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування
Роботизовані захватні пристрої серії SCIC Z-EFG мають невеликі розміри та вбудовану сервосистему, що дозволяє досягати точного контролю швидкості, положення та сили затиску. Передова система захоплення SCIC для автоматизованих рішень дозволить вам відкрити нові можливості для автоматизації завдань, які ви ніколи не вважали можливими.

Функція

·Невеликий, але потужний електричний захват із серводвигуном.
·Термінали можна замінити для задоволення різних вимог проекту.
·Може піднімати крихкі та деформовані предмети, такі як яйця, пробірки, кільця тощо.
·Підходить для місць без джерел повітря (таких як лабораторії та лікарні).
Інтегрована сервосистема застосовується для різних запитів
Велика сила затискання
Сила затиску: 80 Н,
хід: 20 мм
Контроль точності
Повторюваність: ±0,02 мм
Підключи та працюй
Спеціально розроблений дляшестиосьовий електричний захоплювач
Контролер вбудований
Невелика площа покриття, зручна для інтеграції.
Хвіст можна змінити
Його хвіст можна змінити, щоб він застосовувався для різних потреб.
М'яке затискання
Він може затискати крихкі предмети

● Сприяння революції в заміні пневматичних захватів електричними, перший електричний захват із вбудованою сервосистемою в Китаї.
● Ідеальна заміна повітряного компресора + фільтра + електромагнітного клапана + дросельної заслінки + пневматичного захоплювача
● Багатоцикловий термін служби, що відповідає традиційному японському циліндрі




Параметр специфікації
Z-EFG-R — це роботизований електричний захоплювач із вбудованим контролером та кількома функціями в одному. Невеликий за розміром, але потужний за функціональністю.
● Невеликий, але потужний електричний захват із серводвигуном.
●Термінали можна замінити для задоволення різних вимог проекту.
● Може піднімати крихкі та деформовані предмети, такі як яйця, пробірки, кільця тощо.
● Підходить для місць без джерел повітря (наприклад, лабораторій та лікарень).
Z-EFG-R — це невеликий електричний захоплювач із вбудованою сервосистемою, який може замінити насос + фільтр + електромагнітний генератор + дросельний клапан + повітряний захоплювач.
| Модель № Z-EFG-R | Параметри |
| Загальний інсульт | 20 мм |
| Сила захоплення | 80 Н |
| Повторюваність | ±0,02 мм |
| Рекомендована вага захоплення | 0,8 кг |
| Режим передачі | Зубчаста рейка + поперечна роликова направляюча |
| Поповнення мастила рухомих компонентів | Кожні шість місяців або 1 мільйон рухів / час |
| Час руху в одному напрямку | 0,45 с |
| Діапазон робочих температур | 5-55℃ |
| Робочий діапазон вологості | RH35-80 (без замерзання) |
| Режим руху | Два пальці рухаються горизонтально |
| Контроль удару | Регульований |
| Регулювання сили затиску | Регульований |
| Вага | 0,5 кг |
| Розміри (Д*Ш*В) | 68*68*132,7 мм |
| Розміщення контролера | Вбудований |
| Потужність | 5W |
| Тип двигуна | Безщітковий постійного струму |
| Номінальна напруга | 24 В |
| Піковий струм | 1A |
| Адаптивна шестиосьова робота-маніпулятор | Урбан-де-Гіллз, Аубо |
Вбудовані керування та контролер
Z-EFG-R — це невеликий електричний захват із вбудованою сервосистемою, який може замінити повітряний насос + фільтр + електронно-магнітний клапан + дросельну заслінку + повітряний захват.


Сумісний з шестиосьовим роботизованим маніпулятором
Захоплювач сумісний із звичайним шестиосьовим робототехнічним маніпулятором, що забезпечує функцію "підключи та працюй", має хід 20 мм, зусилля затиску 80 Н, хід та зусилля затиску можна регулювати.
Маленька фігурка, гнучке встановлення
Розмір Z-EFG-R становить Д68*Ш68*В132,7 мм, його конструкція компактна, підтримує багатоступеневу установку, має вбудований контролер, займає мало місця та легко застосовується для різних завдань затиску.

Швидка реакція, контроль точності
Найкоротший час руху одного ходу становить 0,45 с, його повторюваність становить ±0,02 мм, його хвостову частину можна легко змінювати, клієнти можуть затискати об'єкт відповідно до запиту.
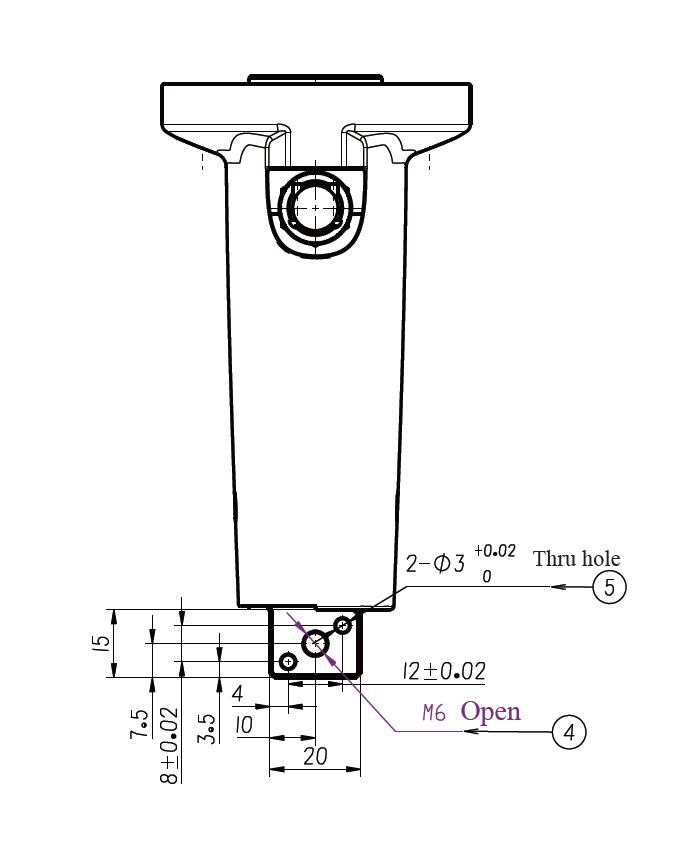
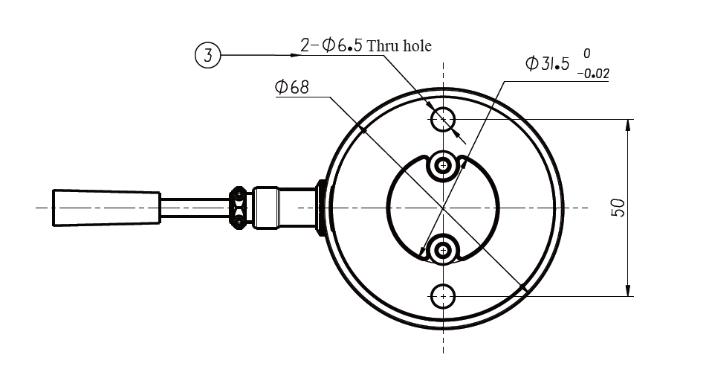
Схема встановлення розмірів
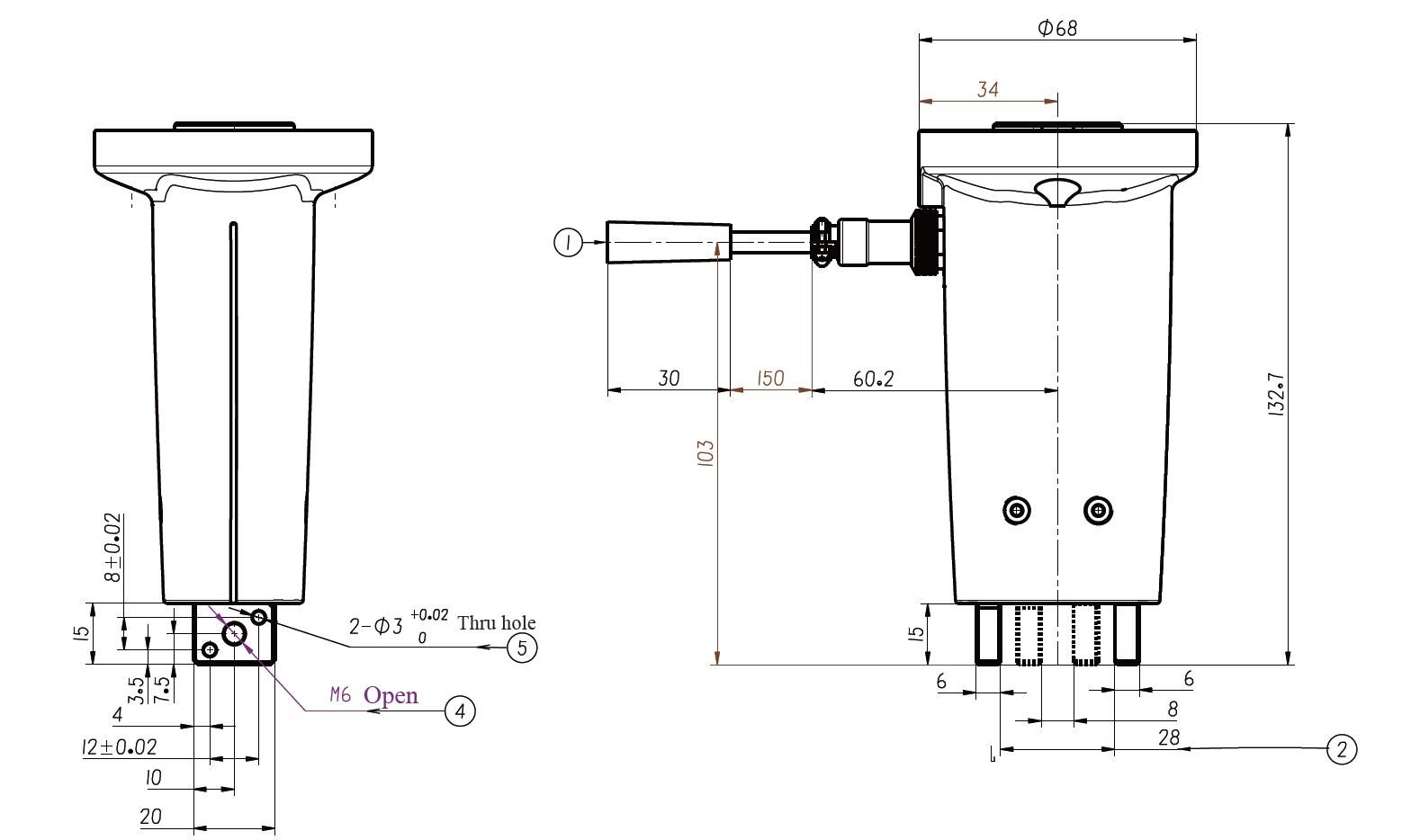
① RKMV8-354 П'ятижильний авіаційний штекер до RKMV8-354
② Хід електричного захвату становить 20 мм
③ Положення встановлення, використовуйте два гвинти M6 для з'єднання з фланцем на кінці маніпулятора робота UR
④ Положення монтажу, положення встановлення світильника (гвинт M6)
⑤ Положення встановлення, положення встановлення кріплення (3 циліндричні отвори для штифтів)
Електричні параметри
Номінальна напруга 24±2 В
Струм 0,4 А

Наш бізнес


Категорії продуктів
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGE –...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGE –...
-

СЕРІЯ ELECTRIC GRIPPER HITBOT – Z-EFG-50 Paral...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-40...