СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-20 Паралельний електричний захват


Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування
Роботизовані захватні пристрої серії SCIC Z-EFG мають невеликі розміри та вбудовану сервосистему, що дозволяє досягати точного контролю швидкості, положення та сили затиску. Передова система захоплення SCIC для автоматизованих рішень дозволить вам відкрити нові можливості для автоматизації завдань, які ви ніколи не вважали можливими.

Функція

· Вбудований контролер
·Регульований хід та сила захоплення
· Кінець можна замінити для адаптації до різних потреб
· Збирайте крихкі та деформовані предмети, такі як яйця,пробірки, кільця тощо.
· Застосовувати для місць без джерела повітря (наприклад, лабораторія, лікарня)
Точність керування, затискання у невеликому просторі, швидке та стабільне затискання
Велика сила затискання
Загальний хід становить 20 мм, зусилля затиску – 80 Н.
Точність для контролю
Повторюваність: ±0,02 мм
Тривалий термін служби
Десятки мільйонів циклів, понад повітряний захоплювач
Контролер вбудований
Невеликий простір, зручно інтегруватися.
Режим керування
Імпульсні контролери вводу/виводу (опція)
М'яке затискання
Він може затискати крихкі предмети




Параметр специфікації
| Модель № Z-EFG-20 | Параметри |
| Всього інсульт | 20 мм |
| Сила захоплення | 30~80 Н |
| Повторюваність | ±0,02 мм |
| Рекомендована вага захоплення | 0,8 кг |
| Спосіб передавання режим | Зубчаста рейка + поперечна роликова направляюча |
| Поповнення мастила рухомих компонентів | Кожні шість місяців або 1 мільйон рухів / час |
| Час руху в одному напрямку | 0,45 с |
| Діапазон робочих температур | 5-55℃ |
| Робочий діапазон вологості | РХ35-80(Без морозу) |
| Режим руху | Два пальці рухаються горизонтально |
| Контроль удару | Регульований |
| Регулювання сили затиску | Регульований |
| Вага | 0,458 кг |
| Розміри(Д*Ш*В) | 44*30*124,7 мм |
| Розміщення контролера | Вбудований |
| Потужність | 5W |
| Тип двигуна | Безщітковий постійного струму |
| Піковий струм | 1A |
| Номінальна напруга | 24 В |
| Струм очікування | 0,2 А |
| Ударостійкий / вібростійкий | 98 м/с |
| Діаметр двигуна | 28 мм |
* Сила захоплення Z-EFG-20: Силу захоплення можна регулювати, додаючи матеріал контрольованої деформації до передньої частини пристосування, який отримують відповідно до кривої деформації та сили.
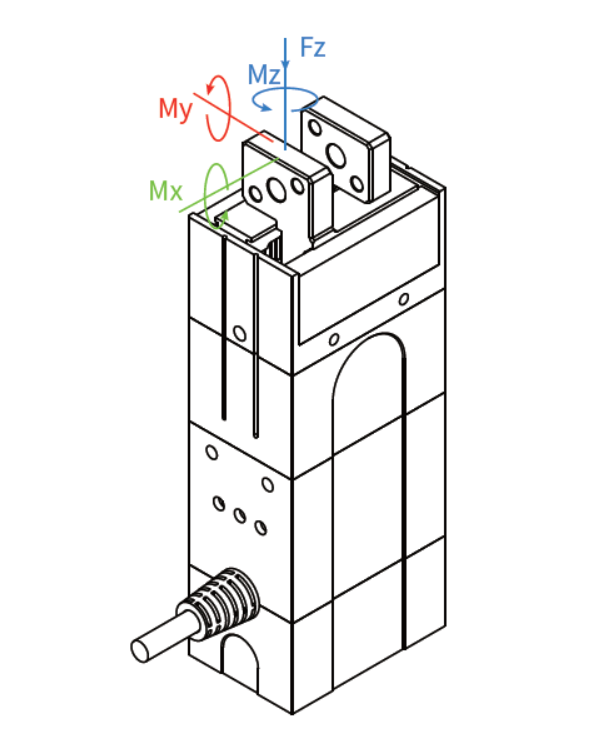
| Допустиме статичне навантаження у вертикальному напрямку | |
| Фз: | 150 Н |
| Допустимий крутний момент | |
| Мх: | 2,1 Нм |
| Моє: | 2,34 Нм |
| Мз: | 2 Нм |
Велика сила затискання, точний контроль сили

Електричний захват оснащений спеціальною конструкцією трансмісії та компенсацією розрахунку приводу, його сила затиску становить 80 Н з плавним регулюванням, загальний хід становить 20 мм, а повторюваність – ±0,02 мм.
Режим руху та хід регулюються
Рух електричного захвату належить до паралельного руху двох пальців, найкоротший час одного ходу становить лише 0,45 с, вага затискання ≤0,8 кг, що відповідає вимогам стабільного затискання для виробничої лінії.
Компактна конструкція, гнучка в установці.

Розмір Z-EFG-20 становить Д40*Ш30*В124,7 мм, його конструкція компактна, підтримує більше п'яти режимів встановлення, має вбудований контролер, займає невеликий простір, що дозволяє легко виконувати різні затискні завдання.


Інтегрований привод та контролер, м'яке затискання

Хвіст Z-EFG-20 можна легко змінювати, клієнти можуть затискати об'єкти на замовлення, проектувати хвіст та використовувати електричний захват для максимального виконання завдань затискання.
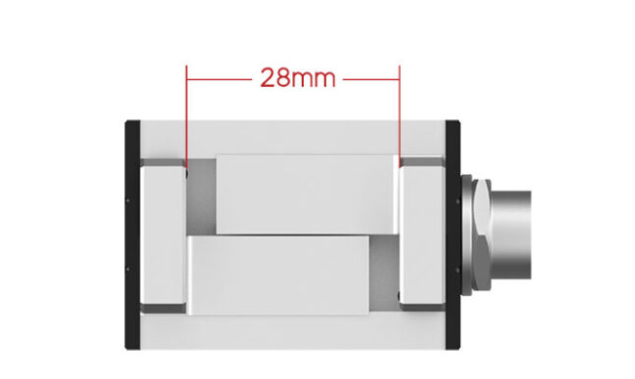
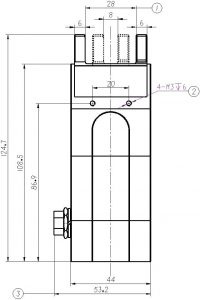
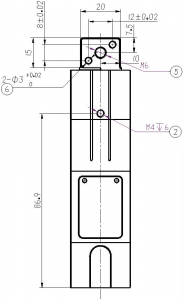
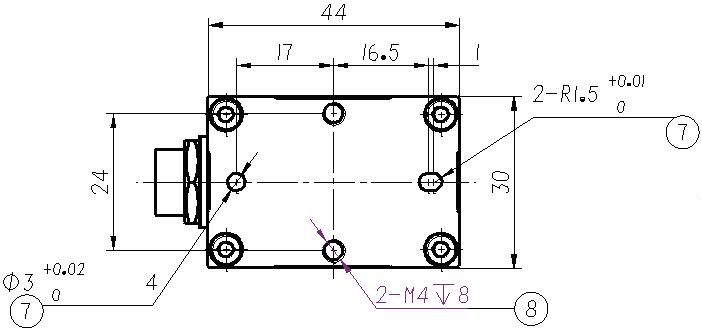
Схема встановлення розмірів
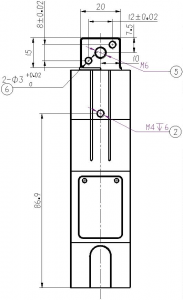
① Хід руху пальців захоплення
② Бічне положення монтажу (різьбовий отвір)
③ Розташування проводки авіаційної розетки
④ Положення сили регулювання захвату (ліворуч) та індикаторної лампочки (праворуч)
⑤ Положення встановлення захвата (різьбовий отвір)
⑥ Положення встановлення захвата (отвір для штифта)
⑦ Нижнє положення кріплення (отвір для штифта)
⑧ Нижнє положення кріплення ((різьбовий отвір)
Наш бізнес


Категорії продуктів
-

СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-C5...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGE –...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGC –...