СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-26 Паралельний електричний захват



Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування
Роботизовані захватні пристрої серії SCIC Z-EFG мають невеликі розміри та вбудовану сервосистему, що дозволяє досягати точного контролю швидкості, положення та сили затиску. Передова система захоплення SCIC для автоматизованих рішень дозволить вам відкрити нові можливості для автоматизації завдань, які ви ніколи не вважали можливими.

Функція
·Виявлення падіння захвата, функція виведення площі
· Зусилля, положення та швидкість можна точно контролювати через Modbus
· Тривалий термін служби: десятки мільйонів циклів, що перевершує повітряні кігті
·Вбудований контролер: малий розмір, проста інтеграція
·Режим керування: 485 (Modbus RTU), введення/виведення
Зусилля затискання та швидкість можна точно контролювати за допомогою Modbus
Кілька застосувань
Він має виявлення падіння затискача та вивід на ділянці
Точний для контролю
Зусилля затискання, біт, швидкість можна контролювати за допомогою Modbus
Тривалий термін служби
Десять мільйонів циклів, над повітряним захопленням
Вбудований контролер
Займає невеликий простір, зручно інтегруватися.
Швидко реагувати
Найкоротший час одного ходу становить лише 0,25 с
М'яке затискання
Він може затискати крихкі предмети, такі як яйця, скляні чашки тощо.




Параметр специфікації
Z-EFG-26 — це електричний паралельний захоплювач із 2 пальцями, невеликий за розміром, але потужний для захоплення багатьох м’яких предметів, таких як яйця, труби, електронні компоненти тощо.
● Електричний захват Z-EFG-26 має вбудований контролер.
●Його хід та сила захоплення регулюються.
●Термінали можна замінити для адаптації до різних вимог.
●Легко підбирає крихкі та деформовані предмети, такі як яйця, пробірки, кільця тощо.
●Підходить для місць без джерел повітря (таких як лабораторії та лікарні).
| Модель № Z-EFG-26 | Параметри |
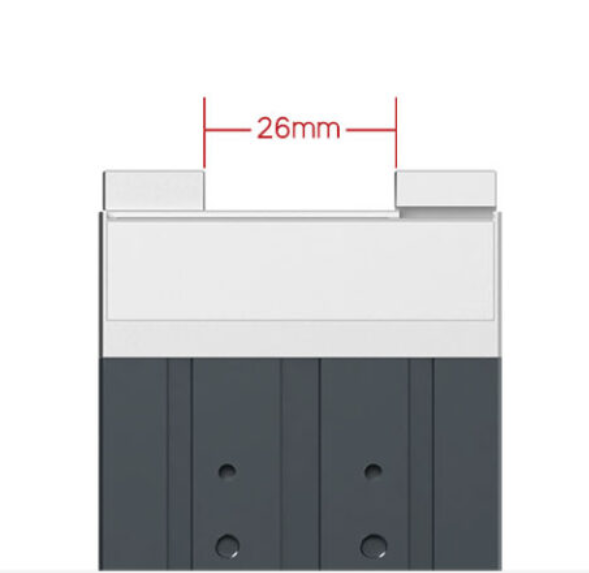
| Всього інсульт | 26 мм |
| Сила захоплення | 6~15 н.ш. |
| Повторюваність | ±0,02 мм |
| Рекомендована вага захоплення | Макс. 0,3 кг |
| Спосіб передавання режим | Зубчаста рейка + поперечна роликова направляюча |
| Поповнення мастила рухомих компонентів | Кожні шість місяців або 1 мільйон рухів / час |
| Час руху в одному напрямку | 0,25 с |
| Діапазон робочих температур | 5-55℃ |
| Робочий діапазон вологості | РХ35-80(Без морозу) |
| Режим руху | Два пальці рухаються горизонтально |
| Контроль удару | Регульований |
| Регулювання сили затиску | Регульований |
| Вага | 0,45 кг |
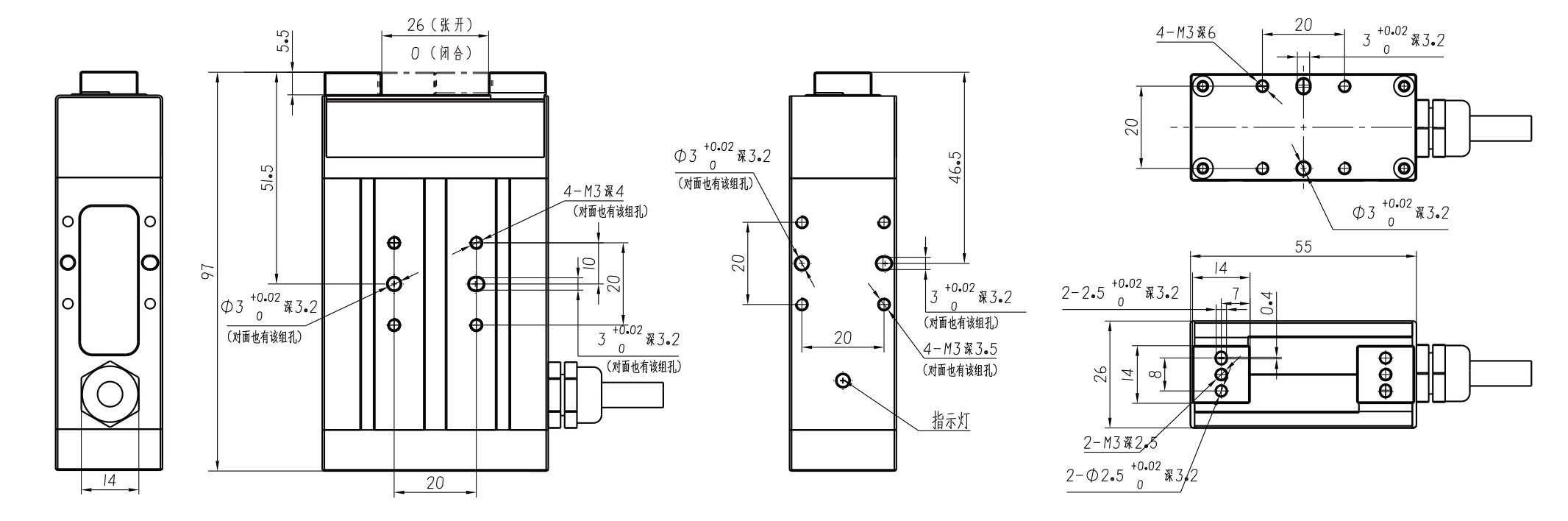
| Розміри(Д*Ш*В) | 55*26*97 мм |
| Розміщення контролера | Вбудований |
| Потужність | 10 Вт |
| Тип двигуна | Безщітковий постійного струму |
| Піковий струм | 1A |
| Номінальна напруга | 24 В |
| Струм очікування | 0,4 А |
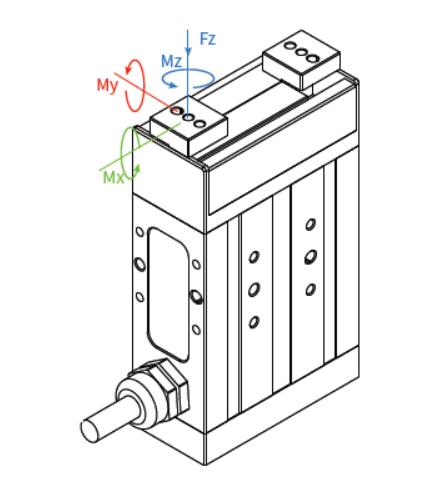
| Допустиме статичне навантаження у вертикальному напрямку | |
| Фз: | 250 Н |
| Допустимий крутний момент | |
| Мх: | 2,4 Нм |
| Моє: | 2,6 Нм |
| Мз: | 2 Нм |
Точність повторення при точному управлінні силою

Електричний захват має спеціальну конструкцію трансмісії та розрахунок приводу для компенсації, його загальний хід становить 26 мм, зусилля затиску – 6-15 Н, хід та зусилля затиску регулюються, а його повторюваність становить ±0,02 мм.
Швидка реакція, більш стабільна

Найкоротший час одного ходу становить лише 0,25 с, що може задовольнити вимоги швидкого та стабільного затискання для виробничої лінії.
Маленька фігура, легко інтегрується

Розмір Z-EFG-26 становить Д55*Ш26*В97 мм, його конструкція компактна, підтримує більше п'яти гнучких режимів встановлення, він має вбудований контролер, займає мало місця та легко справляється з багатьма завданнями для різних вимог до затискання.

Інтегрований привід та контролер м'якого затиску

Хвостову частину електричного захвату можна легко змінювати, його вага затискання становить 300 г, клієнти можуть спеціально розробити хвостову частину захвату відповідно до власних об'єктів затискання, щоб електричний захват міг максимально виконувати завдання затискання.
Режими множинного керування, прості в експлуатації

Конфігурація захвату Z-EFG-26 проста, він має численні режими керування: 485 (Modbus RTU), імпульсний, введення/виведення, сумісний з головною системою керування ПЛК.

Схема встановлення розмірів
Наш бізнес


Категорії продуктів
-

СЕРВОЕЛЕКТРОМОБІЛЬНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ PGS –...
-

СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-C6...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРВОЕЛЕКТРОМЕТРИЧНИЙ ЗАХОПЛЮВАЧ DH ROBOTICS СЕРІЇ RGI –...
-

СЕРІЯ ЕЛЕКТРИЧНИХ ЗАХОПЛЮВАЧІВ HITBOT – Z-EFG-20P Пара...
-

СЕРІЯ МОДУЛІВ ЗАХОПЛЕННЯ – FPT Двопальцевий Т...