Захват для колаборативного робота – ISC Inner Soft Clamp Cobot Arm Gripper



Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації / Захоплювач для коботного маніпулятора / М'який захоплювач / Захоплювач для робот-маніпулятора
Застосування

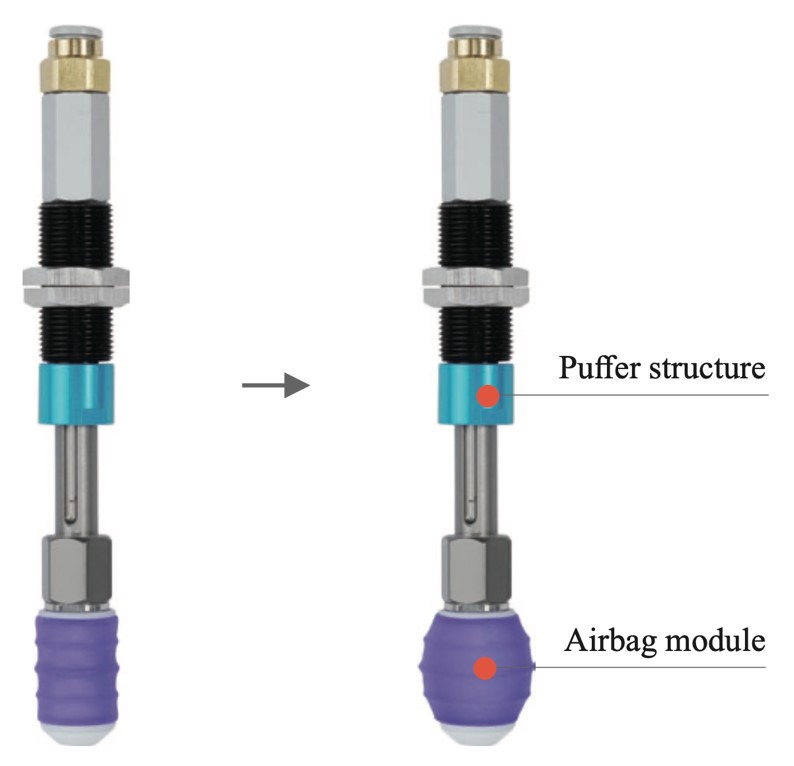
Внутрішній затискач ISC – це інноваційне м'яке пристосування, конструкція якого імітує морфологію самооборони риби-фугу. Завдяки надуванні повітрям під тиском, пристосування може розширюватися та завершувати захоплення внутрішньої опори.
Оскільки контактуюча частина з заготовкою виготовлена з м'якої силіконової гуми, після додавання тиску між жорсткою опорною та контактною поверхнею утворюється шар «повітряної подушки», що забезпечує рівномірність напруження та запобігає пошкодженню заготовки. Крім того, тиск вхідного повітря можна регулювати для контролю розширення подушки та напруження, що контактує з заготовкою, що значно підвищує м'якість системи захоплення.
Функція

·Зображення для водіння: чисте повітря
·Стандартний термін служби: >100 000 разів
·Максимальна робоча частота (копій за хвилину): 300
● Внутрішній опорний затискач має спеціальну структуру подушки безпеки та може створювати різні деформації разом із внутрішнім тиском.
● Вхідний позитивний тиск: Пристосування висувається, самоадаптивно підтримуючи внутрішню поверхню об'єкта та завершуючи захоплення.
● Вхідний негативний тиск: Пристрій демонструє природні статичні положення та відпускає об'єкти.
М'які захоплювачі SFG були впроваджені з роботами-маніпуляторами світового класу, зокрема:

4-осьовий горизонтальний (SCARA) робот Delta
Рука промислового робота Nachi Fujikoshi
4-осьовий паралельний (дельта) робот ABB
6-осьовий колаборативний робот UR
6-осьовий колаборативний робот AUBO



Параметр специфікації
Внутрішній затискач для повітряної подушки ISC – це інноваційне м'яке пристосування, конструкція якого імітує морфологію самооборони риби-фугу. Завдяки надуванні повітря під тиском, пристосування може розширюватися та завершувати захоплення внутрішньої опори. Оскільки тиск вхідного повітря можна точно контролювати, можна контролювати силу захоплення пристосування до заготовки, що запобігає її пошкодженню.
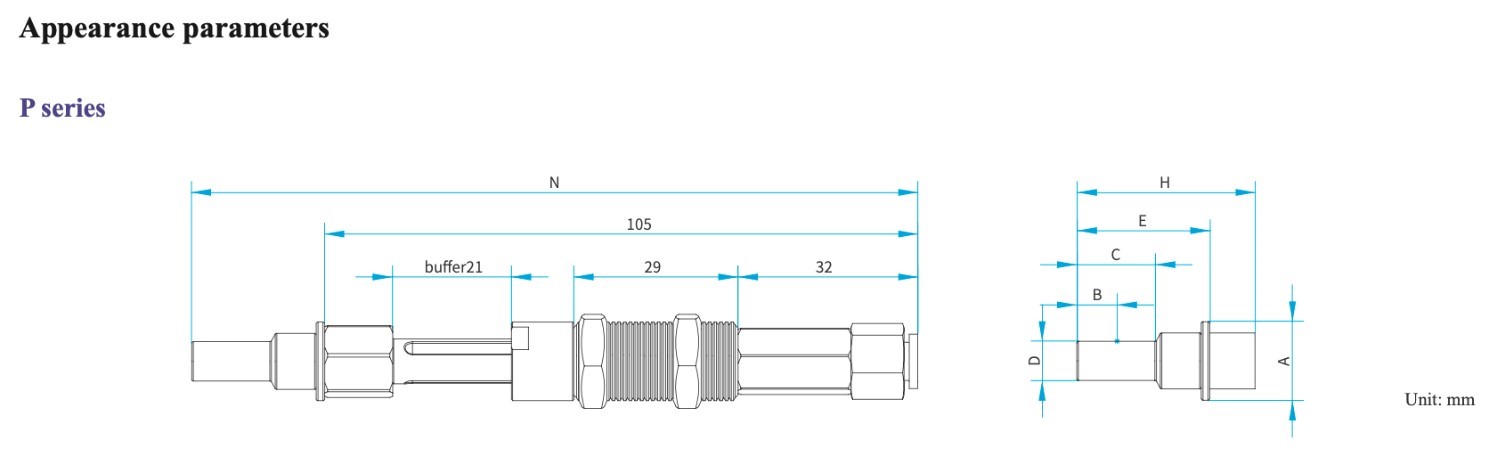
| Модель | Загальна висота модуля подушки безпеки H | Діаметр контактної поверхні D | Діаметр конструктивної частини А | Висота від робочого діаметра до дна B | Висота ефективної поверхні контакту C | Робоча висота подушки безпеки модуль Е | Загальна довжина N |
| ISC-P4.5E | 25,5 | 4.5 | 14 | 4 | 8 | 17,5 | Схід+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | Схід+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | Схід+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | Схід+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | Схід+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7.5 | 15 | 24,5 | Схід+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7.5 | 15 | 24,5 | Схід+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7.5 | 15 | 26,5 | Схід+105 |
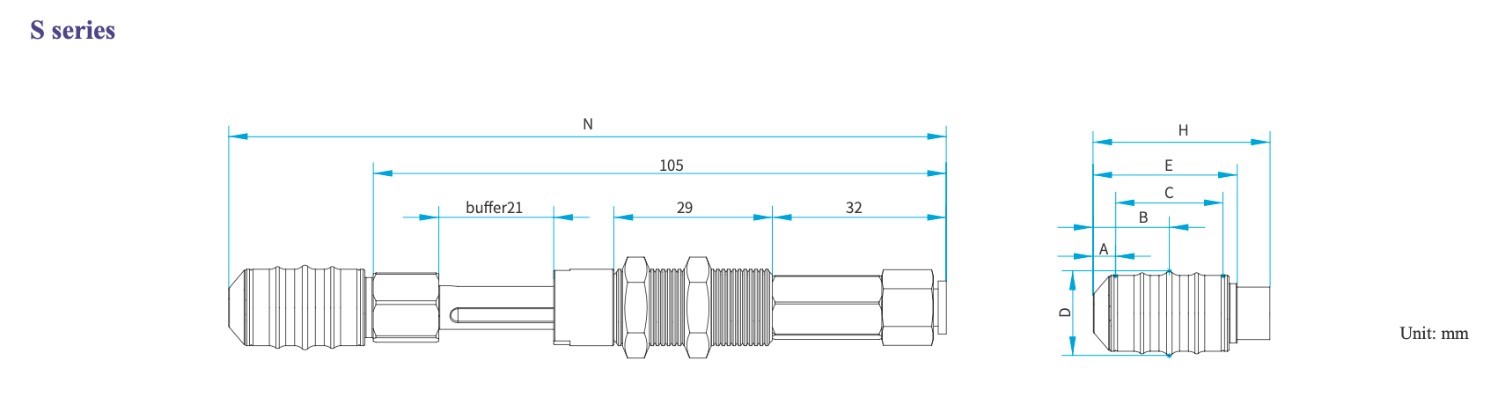
| Модель | Загальна висота модуля подушки безпеки H | Діаметр контактної поверхні D | висота напрямної A | Висота від робочого діаметра до дна B | Висота ефективної поверхні контакту C | Робоча висота подушки безпеки модуль Е | Загальна довжина N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | Схід+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | Схід+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | Схід+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | Схід+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | Схід+105 |
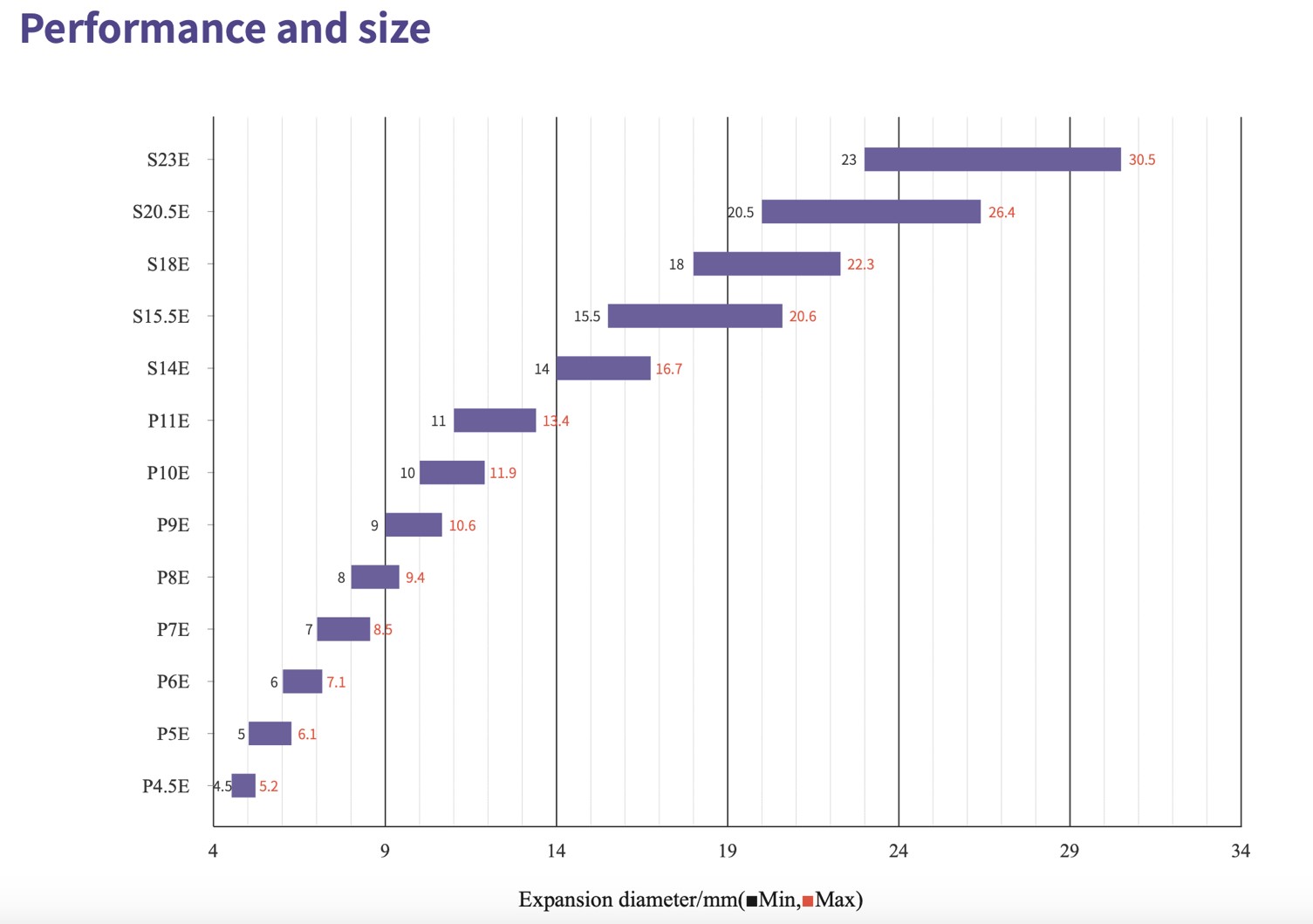
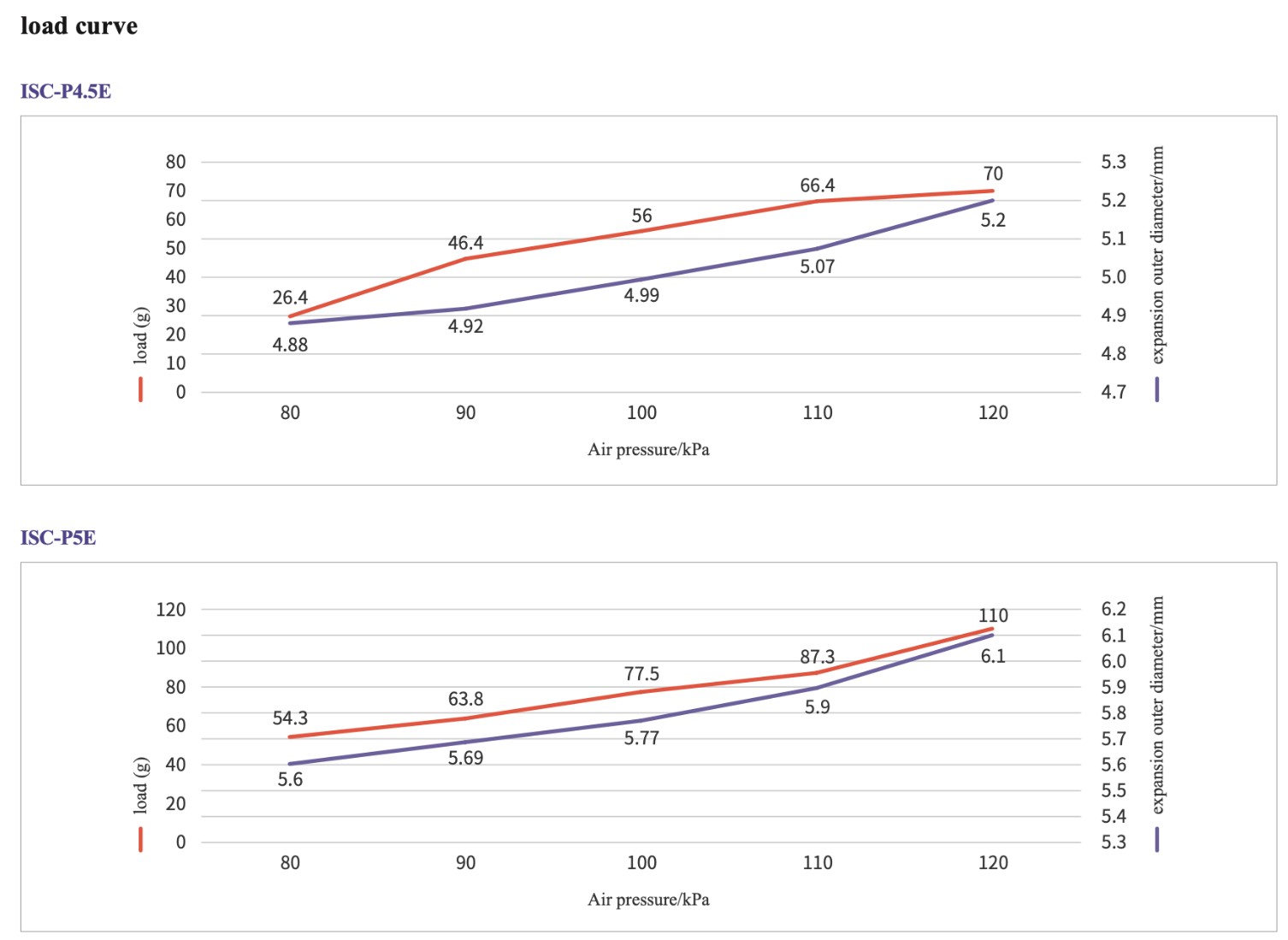
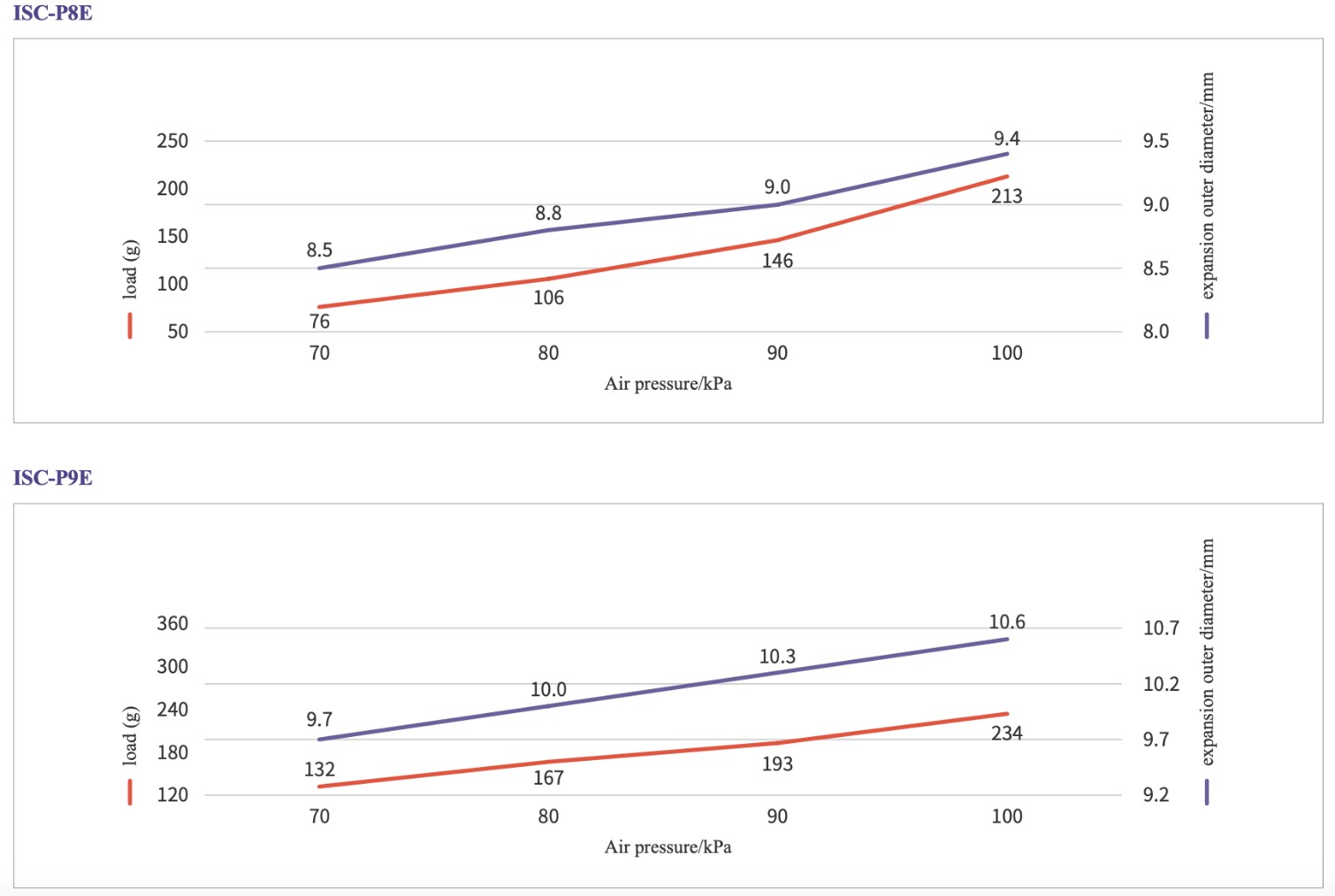
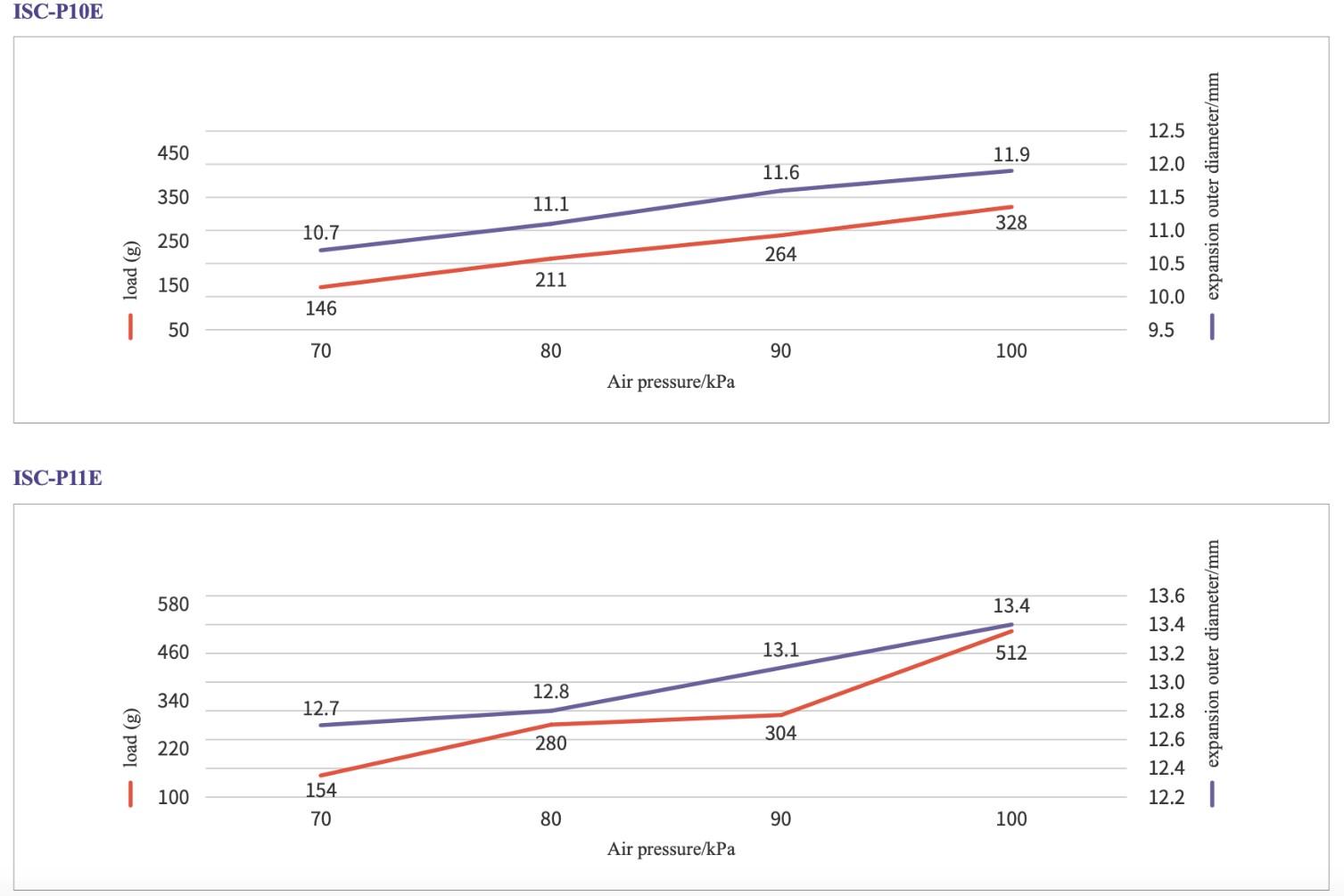
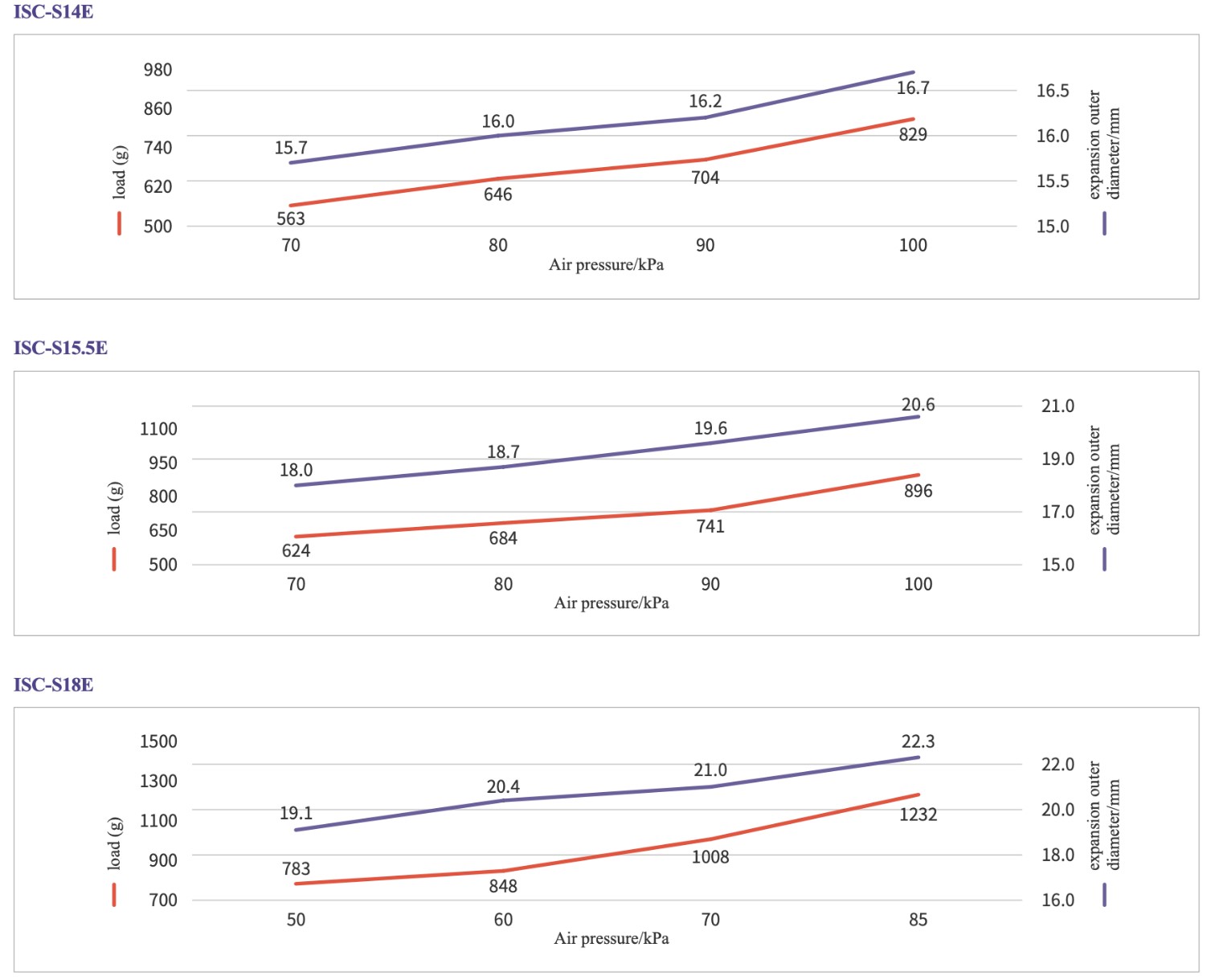
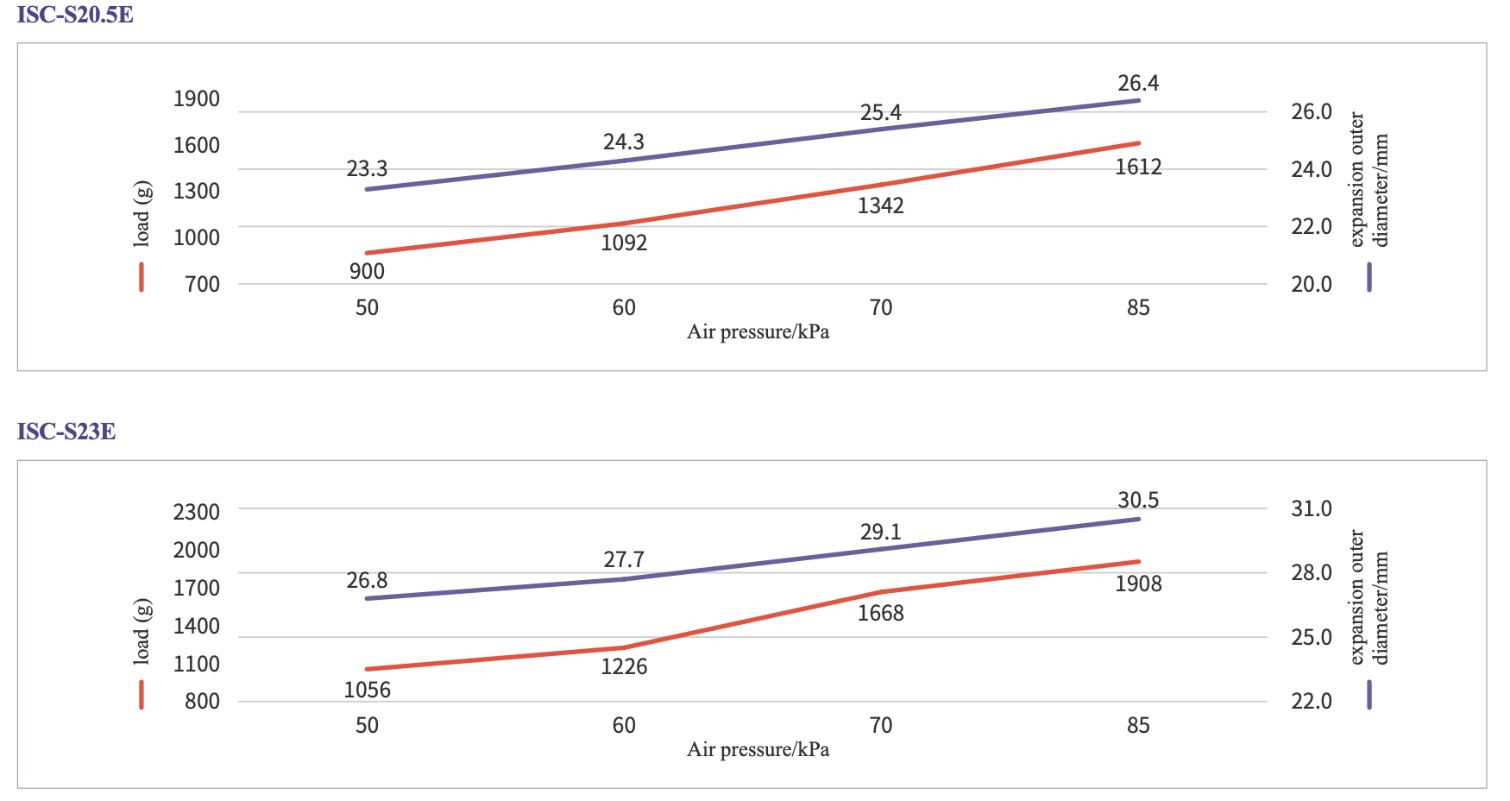
Розширений зовнішній діаметр
| Модель | Діапазон робочого тиску / кПа | Максимальний зовнішній діаметр розширення/мм | Максимальне навантаження/г | Вага приладу/г | Модель металевого стрижня | Розмір монтажного отвору/мм |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | ВФНТ 1421-G18 | 14,5 |
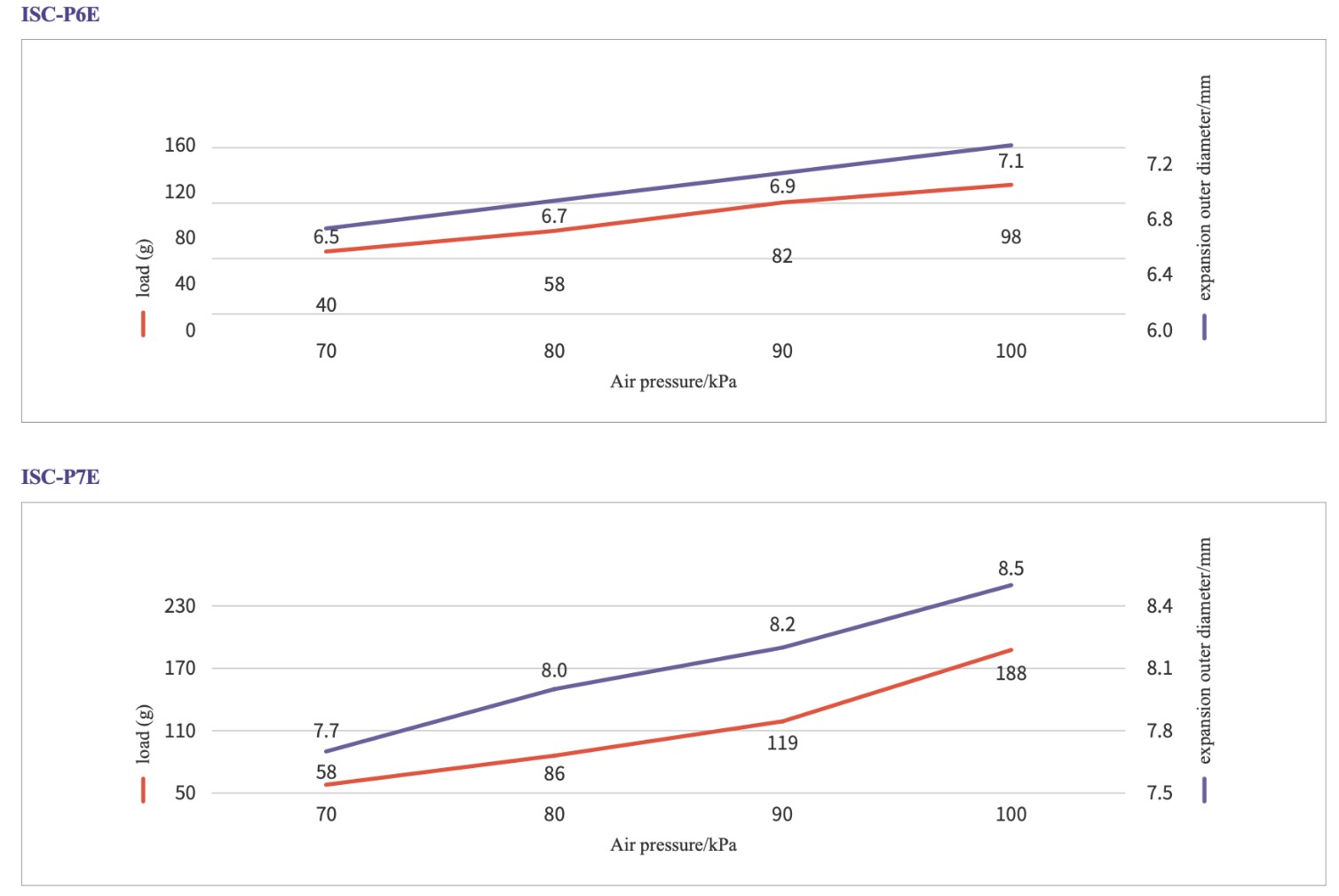
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 рік | 49 | ВФНТ 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 рік | 51 | ВФНТ 1421-G18 | 14,5 |
* Серія P: максимальне навантаження на об'єкт випробування – зовнішній діаметр моделі +0,3 мм; серія S: максимальне навантаження на об'єкт випробування – зовнішній діаметр моделі +1 мм; випробування на навантаження вимірюється професійними інструментами.
Наш бізнес







