Колаборативний пневматичний вакуумний генератор із двома пальцями та м'яким захопленням для автоматизації роботів



Колаборативний пневматичний вакуумний генератор із двома пальцями та м'яким захопленням для автоматизації роботів
Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування

Роботизовані захватні пристрої серії SCIC Z-EFG мають невеликі розміри та вбудовану сервосистему, що дозволяє досягати точного контролю швидкості, положення та сили затиску. Передова система захоплення SCIC для автоматизованих рішень дозволить вам відкрити нові можливості для автоматизації завдань, які ви ніколи не вважали можливими.
Функція
·Великий інсульт
·Регульоване зусилля затиску та регульований хід
· Тривалий термін служби: десятки мільйонів циклів, що перевершує повітряні кігті
·Вбудований контролер: малий розмір, проста інтеграція
·Керування шиною EIA485, введення/виведення
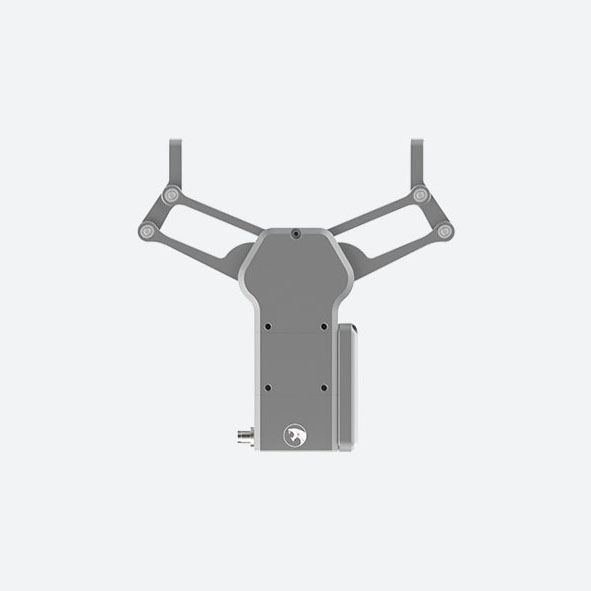
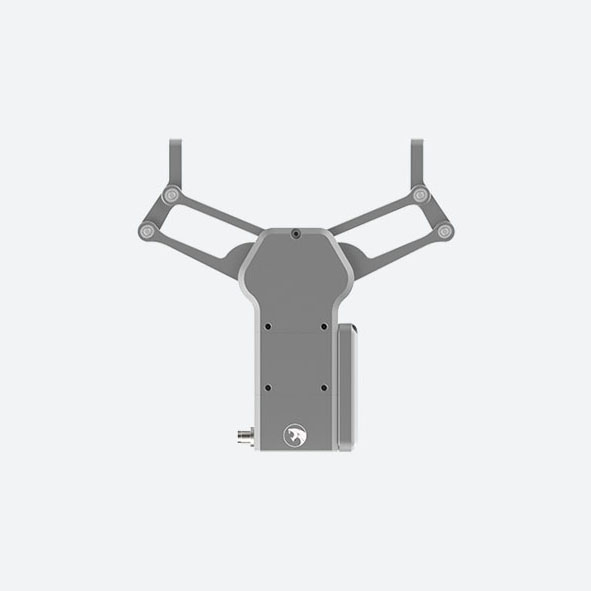
Сила затиску: 40-130 Н, Y-подібна форма електричного захвату з ходом 120 мм
Довгий хід
Загальний хід: 120 мм
Режим керування
485 Modbus, EIA485, керування шиною
Сила затискання
Регульована сила затиску 40-130 Н
Контролер всередині
Охоплює невелику площу, легко інтегрується
Контроль точності
Повторюваність: ±0,02 мм
М'яке затискання
Він може затискати крихкі та деформовані предмети

● Сприяння революції в заміні пневматичних захватів електричними, перший електричний захват із вбудованою сервосистемою в Китаї.
● Ідеальна заміна повітряного компресора + фільтра + електромагнітного клапана + дросельної заслінки + пневматичного захоплювача
● Багатоцикловий термін служби, що відповідає традиційному японському циліндрі



Параметр специфікації
| Модель № Z-EFG-130 | Параметри |
| Всього інсульт | 120 мм |
| Сила захоплення | 40-130 Н |
| Повторюваність | ±0,02 мм |
| Рекомендована вага захоплення | Макс. 1 кг |
| Спосіб передавання режим | Гвинтова гайка + тяга |
| Поповнення мастила рухомих компонентів | Кожні шість місяців або 1 мільйон рухів / час |
| Час руху в одному напрямку | 0,9 с |
| Діапазон робочих температур | 5-55℃ |
| Робочий діапазон вологості | РХ35-80(Без морозу) |
| Режим руху | Зв'язка |
| Контроль удару | Регульований |
| Регулювання сили затиску | Регульований |
| Вага | 0,8 кг |
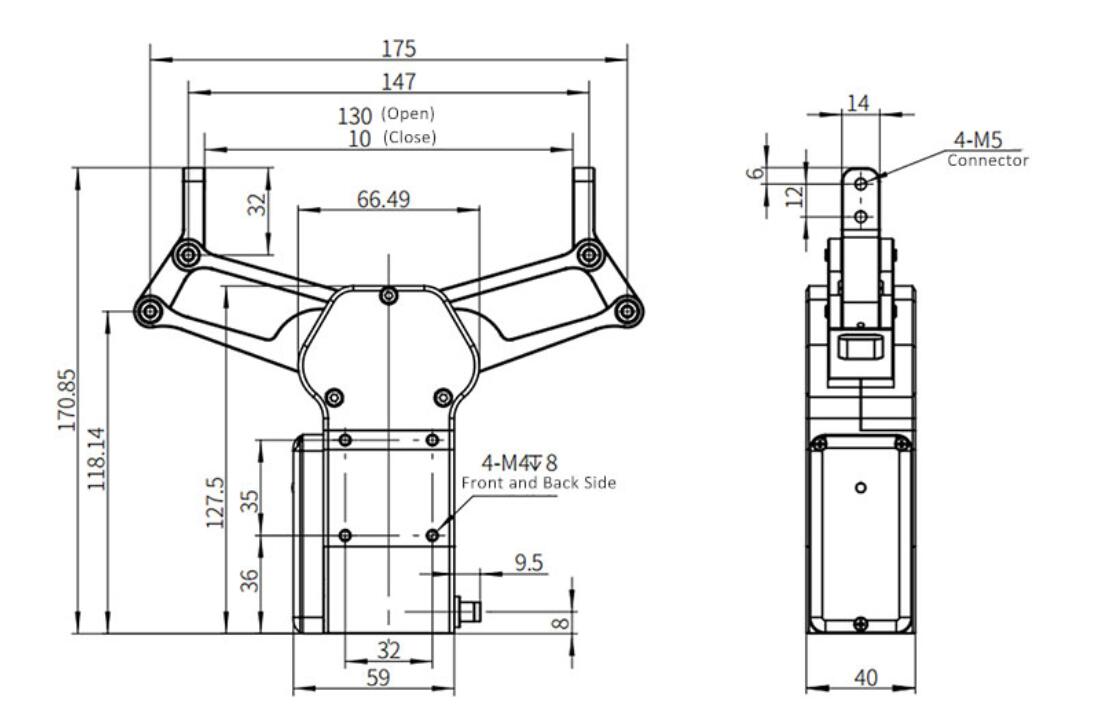
| Розміри(Д*Ш*В) | 171*187*40 мм (відкритий) 218*66,5*40 м (закритий) |
| Розміщення контролера | Вбудований |
| Потужність | 10 Вт |
| Тип двигуна | Безщітковий постійного струму |
| Піковий струм | 2A |
| Номінальна напруга | 24 В |
| Струм очікування | 0,4 А |
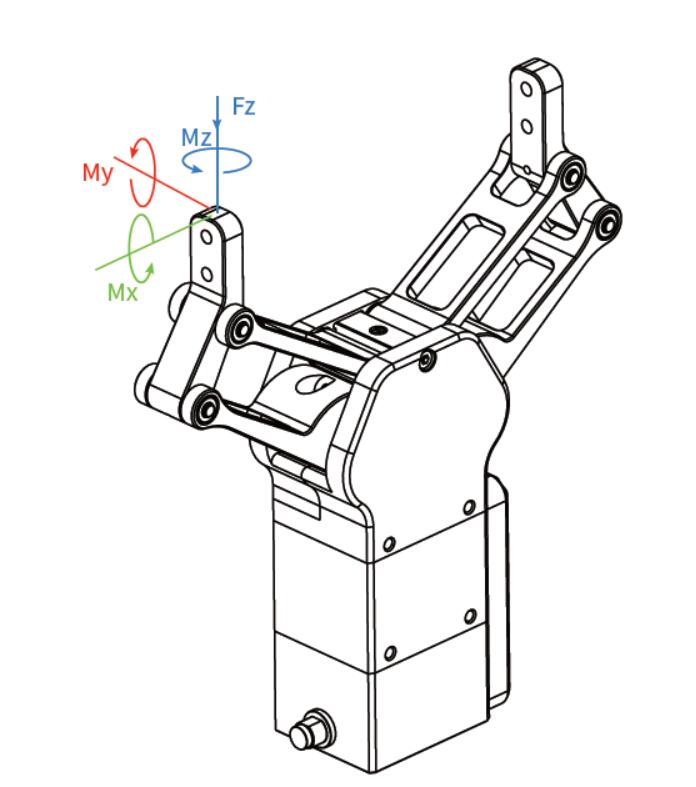
| Допустиме статичне навантаження у вертикальному напрямку | |
| Фз: | 200 Н |
| Допустимий крутний момент | |
| Мх: | 2 Нм |
| Моє: | 2 Нм |
| Мз: | 2 Нм |
Підключи та працюй, зручно інтегрувати
Електричний захват Z-EFG-130 сумісний з маніпулятором робота-колаборатора та має вбудовану сервосистему, лише один захват може бути еквівалентним компресору + фільтру + електромагнітному клапану + дросельному клапану + повітряному захвату.


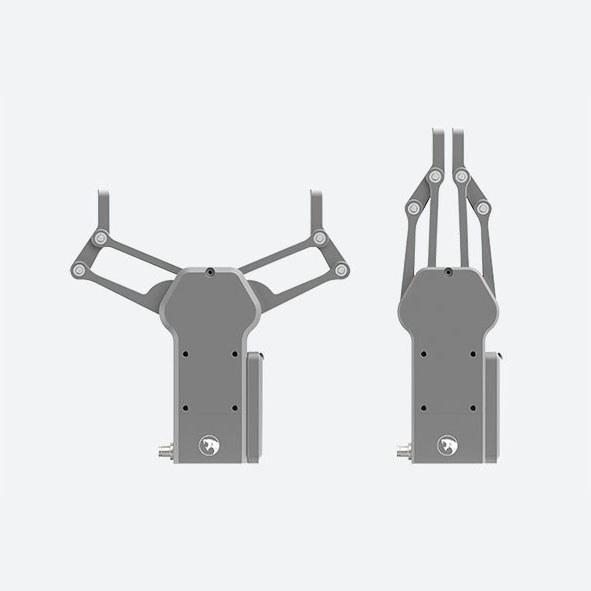
Довгий хід, чудова сумісність
Ефективний хід електричного захвату може досягати 120 мм, а розмір закриття — 10 мм, електричний захват може використовуватися для напівпровідникових мікросхем, 3C-електроніки та інших прецизійних галузей промисловості тощо.
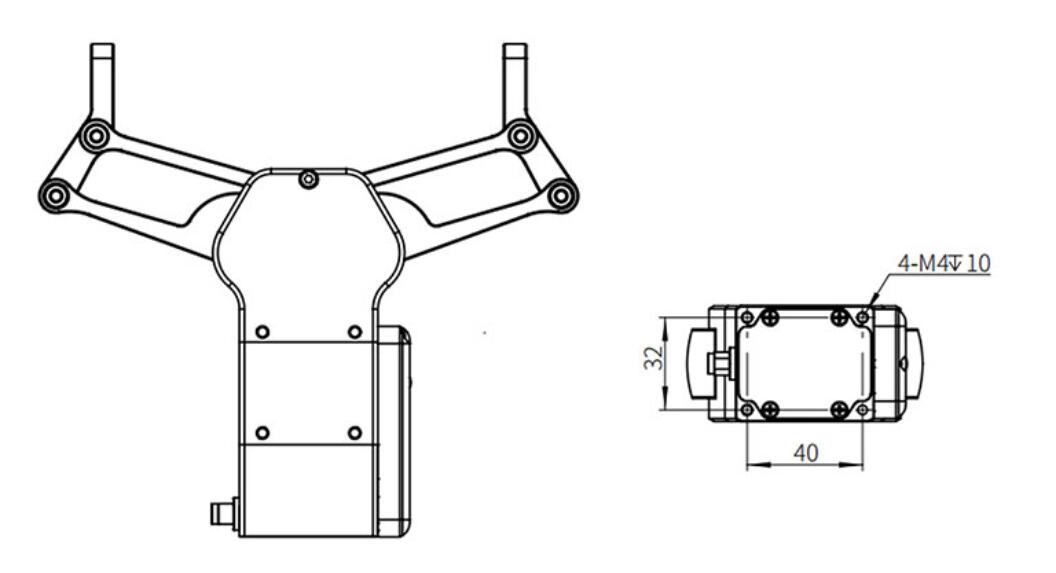
Малий розмір, зручна інтеграція

Розмір отвору Z-EFG-130 становить 171*187*40 мм, розмір закриття — 218*66,5*40 мм, це компактна конструкція, підтримка різних типів встановлення, всередині є контролер, невелика площа покриття.

Точність, контроль сили
Електричний захват використовує спеціальну конструкцію трансмісії та компенсацію алгоритму приводу, зусилля затискання регулюється від 40 до 130 Н, рекомендована вага затискання ≤1 кг, а повторюваність ±0,02 мм.
Адаптивний захват, змінний хвіст

Електричний захват Z-EFG-130 підтримує адаптивне затискання, він більше підходить для круглих, сферичних або спеціальної форми об'єктів, його хвостові частини можна легко змінювати, клієнти можуть затискати об'єкти відповідно до своїх потреб.


Режими керування множинними параметрами, прості в експлуатації

Електричний захват можна точно контролювати через Modbus, його конфігурація проста, для використання протоколу зв'язку цифрового вводу/виводу потрібен лише один кабель для підключення до ввімкнення/вимкнення, він сумісний з головною системою керування ПЛК.
Зміщення центру ваги навантаження
Наш бізнес


Категорії продуктів
-

Конкурентна ціна Промисловий робот 6-осьовий маніпулятор...
-

Промисловий високошвидкісний збирач та розміщення яєць та фруктів 4...
-

Dobot Шестиосьовий колаборативний робот-маніпулятор з шарнірним...
-

Довгий роботизований маніпулятор армії з телескопічним механізмом 20...
-
Гарячий продаж металевої 6-осьової механічної роботизованої руки...
-

Промислова машина Роботизована рука 4-осьовий маніпулятор...