ЧПУ шліфувальний робот-маніпулятор 6-осьовий алюмінієвий промисловий міні-маніпулятор робота 6 кг навчальний робот-маніпулятор





ЧПУ шліфувальний робот-маніпулятор 6-осьовий алюмінієвий промисловий міні-маніпулятор робота 6 кг навчальний робот-маніпулятор
Основна категорія
Промисловий робот-маніпулятор / Колаборативний робот-маніпулятор / Електричний захоплювач / Інтелектуальний привід / Рішення для автоматизації
Застосування
Коботи SCIC Z-Arm — це легкі 4-осьові колаборативні роботи з вбудованим приводним двигуном, які більше не потребують редукторів, як інші традиційні SCARA, що знижує вартість на 40%. Коботи SCIC Z-Arm можуть реалізовувати такі функції, як, але не обмежуючись, 3D-друк, обробка матеріалів, зварювання та лазерне гравірування. Вони здатні значно підвищити ефективність та гнучкість вашої роботи та виробництва.
Особливості

Висока точність
Повторюваність
±0,05 мм
Велике корисне навантаження
Підставка 4 кг
Макс. 5 кг
Вища швидкість
Максимальна лінійна швидкість 1,4 м/с
(Навантаження на підставку 4 кг)
Конкурентна ціна
Якість промислового рівня
Cконкурентна ціна
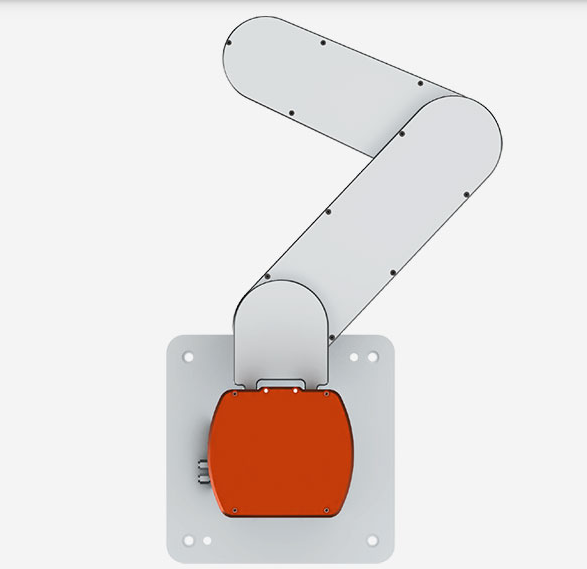
Легке програмування, швидке встановлення, гнучка 4-осьова робота-маніпулятор
Високе навантаження
Стандартне завантаження: 4 кгМаксимальне навантаження: 5 кг
Висока точність
Повторюваність: ±0,05 мм
Налаштована вісь Z
Хід вгору та вниз можна налаштувати в межах від 10 мм до 1000 мм
Висока швидкість
Його лінійна швидкість становить до 1400 мм/с при навантаженні 4 кг.
Легкий у використанні
Також ним легко користуватися навіть тим, хто раніше не знайомий з роботом.
Інтегрований привід та контролер
Без зайвих ланцюгів, легко встановлюється та збирається

Супутні товари



Параметр специфікації
SCIC Z-Arm 4150 розроблений SCIC Tech, це легкий колаборативний робот, простий у програмуванні та використанні, який підтримує SDK. Крім того, він підтримує виявлення зіткнень, тобто автоматично зупиняється при торканні людини, що забезпечує розумну взаємодію людини та машини з високим рівнем безпеки.
| Колаборативна робота-маніпулятор Z-Arm 4150 | Параметри |
| Довжина важеля по 1 осі | 275 мм |
| Кут повороту 1 осі | ±90° |
| Довжина 2-осьового кронштейна | 225 мм |
| Кут обертання 2 осей | ±164° (опціонально): 15-345° |
| Хід по осі Z | Висоту 410 можна налаштувати |
| Діапазон обертання осі R | ±1080° |
| Лінійна швидкість | 1400 мм/с (корисне навантаження 4 кг) |
| Повторюваність | ±0,05 мм |
| Стандартне корисне навантаження | 4 кг |
| Максимальне корисне навантаження | 5 кг |
| Ступінь свободи | 4 |
| Блок живлення | 220 В/110 В 50-60 Гц адаптується до пікової потужності 48 В постійного струму 960 Вт |
| Зв'язок | Ethernet |
| Розширюваність | Вбудований інтегрований контролер руху забезпечує 24 входи/виходи + розширення під рукою |
| Висоту осі Z можна налаштувати | 0,1 м~1 м |
| Навчання перетягуванню по осі Z | / |
| Електричний інтерфейс зарезервований | Стандартна конфігурація: 24 дроти перерізом 23awg (неекрановані) від панелі розеток через кришку нижнього кронштейна Додатково: 2 вакуумні трубки φ4 через панель розеток та фланець |
| Сумісні електричні захвати HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thВісь, 3D-друк |
| Дихання світла | / |
| Діапазон рухів другої руки | Стандартно: ±164° Додатково: 15-345° |
| Додаткові аксесуари | / |
| Використовуйте середовище | Температура навколишнього середовища: 0-45°C Вологість: 20-80% відносної вологості (без заморозків) |
| Цифровий вхід порту вводу/виводу (ізольований) | 9+3+розгинання передпліччя (необов'язково) |
| Цифровий вихід порту вводу/виводу (ізольований) | 9+3+розгинання передпліччя (необов'язково) |
| Аналоговий вхід порту вводу/виводу (4-20 мА) | / |
| Аналоговий вихід порту вводу/виводу (4-20 мА) | / |
| Висота руки робота | 830 мм |
| Вага руки робота | Хід 410 мм, вага нетто 28 кг |
| Розмір бази | 250 мм * 250 мм * 15 мм |
| Відстань між отворами для кріплення основи | 200 мм * 200 мм з чотирма гвинтами M8 * 20 |
| Виявлення зіткнень | √ |
| Дрег-течанг | √ |
Максимальне навантаження: 5 кг, ідеальний вибір для складання
Z-Arm XX50 — це гнучка 4-осьова робототехнічна рука, її максимальне навантаження може сягати 5 кг, вона займає невелику площу, дуже зручна для розміщення на робочому місці або всередині обладнання, вона є ідеальним вибором для автоматичних складальних виробничих ліній.

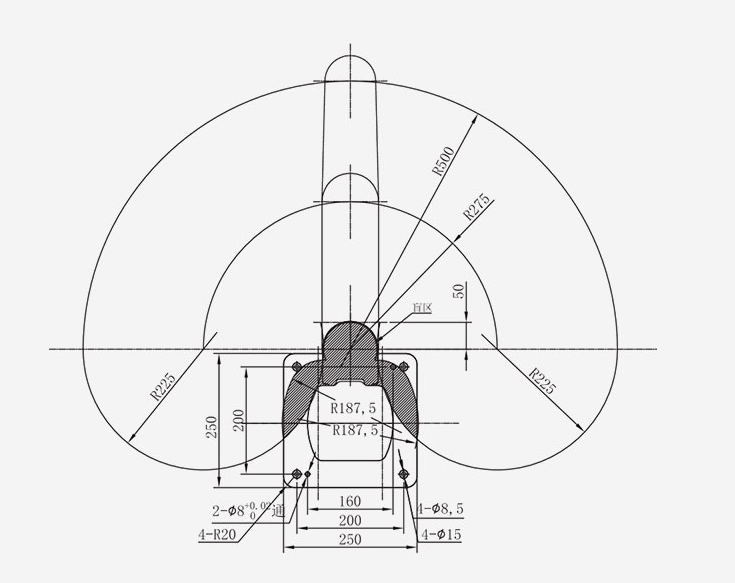
Легкий, великий кут повороту

Вага виробу становить близько 28 кг, розмах рукоятки до 275 мм, кут повороту 1-ї осі становить ±90°, кут повороту 2-ї осі – ±164°, діапазон повороту осі R може досягати ±1080°.
Його висоту можна легко налаштувати
Інтегрований приводний механізм та контролер, без додаткових схем, простий в установці та інтеграції, висота осі Z може бути налаштована від 10 мм до 1000 мм, що дозволяє реалізувати внутрішнє обертання, щоб уникнути перешкод.

Гнучке розгортання, швидке перемикання
Z-Arm XX50 — це робототехнічна рука з високим рівнем інтеграції, яка має характеристики економії місця та гнучкості в розгортанні, підходить для використання в багатьох сферах застосування, не потребує зміни звичайної схеми виробництва, включаючи швидке перемикання та виконання невеликих партій виробництва тощо.
Чудова співпраця та безпека
Роботизована рука може співпрацювати з людиною без додаткового захисту, замінюючи виконання брудних, небезпечних та нудних завдань, уникаючи та зменшуючи травми від повторюваних навантажень та випадкові травми.

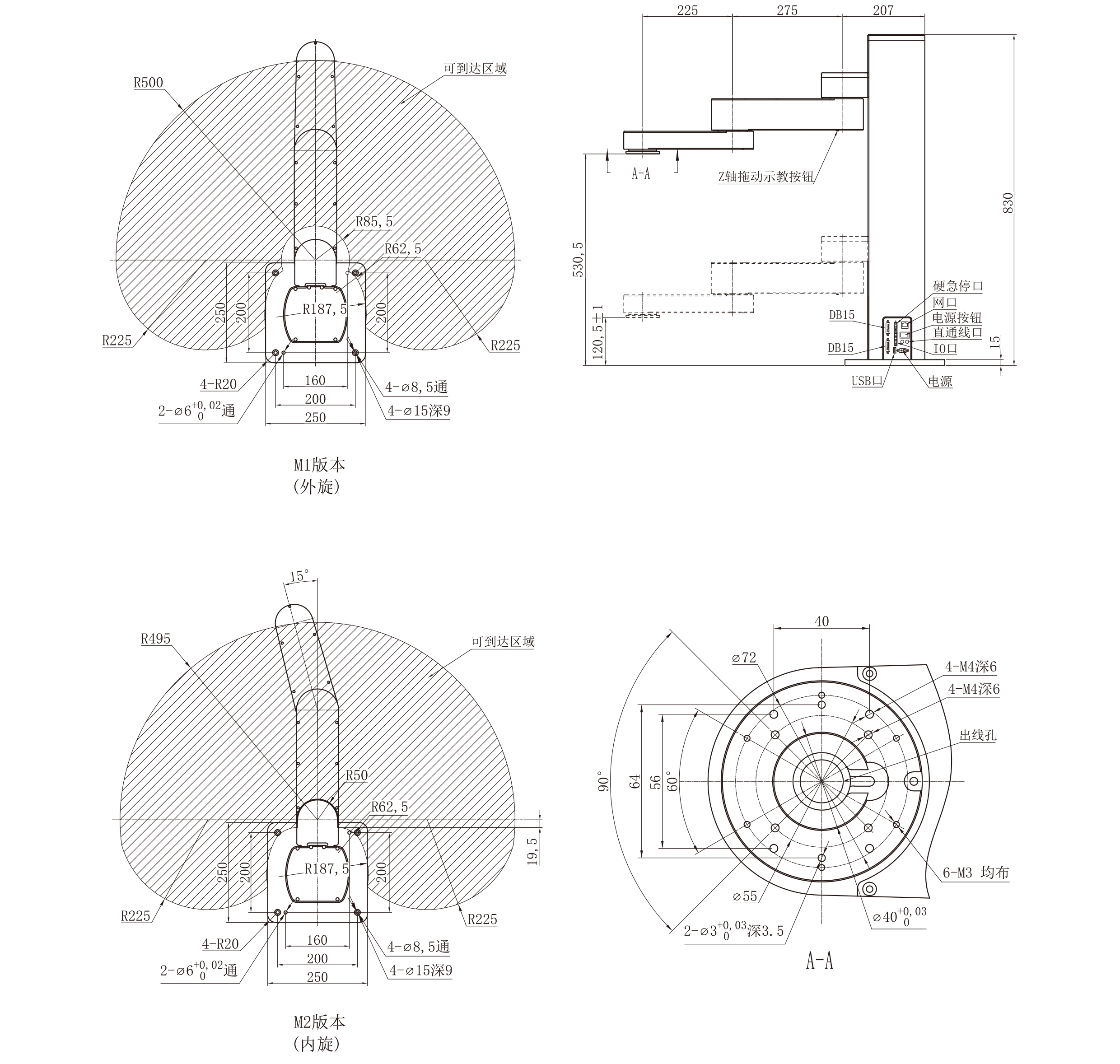
Діапазон руху Версія M1 (поворот назовні)
Рекомендація щодо роз'єму DB15

Рекомендована модель: Позолочений чоловічий штекер з корпусом ABS YL-SCD-15M Позолочений жіночий штекер з корпусом ABS YL-SCD-15F
Розмір Опис: 55 мм * 43 мм * 16 мм
(Див. рисунок 5)
Діаграма зовнішнього середовища використання маніпулятора робота

Наш бізнес


Категорії продуктів
-

Завод автоматизованих конвеєрних систем, малий 6-осьовий...
-

Зварювальний робот-маніпулятор 6 осей, діапазон 1300 мм, корисне навантаження...
-

4086 Високопродуктивний міні-робот-маніпулятор промислового...
-

Легкий промисловий маніпулятор Smart Collab...
-

Токарний центр з ЧПК Колаборативний робот-маніпулятор 6 осей...
-
Промислове шліфування, полірування, механізатор роботів...